시스콘의 AMR은 여러 센서를 통해 자율적으로 주변 장애물을 감지해 목적지까지 최적의 경로를 찾아갑니다. 다양한 경로 설정을 통해 트랙을 따라 정해진 길만 이동하던 기존의 AGV(Auto Guided Vehicle)보다 더 많은 상황에서 쓰일 수 있습니다.
Syscon's AMR automatically detects nearby obstacles through multiple sensors and finds the optimal route to the destination. It can be used in more situations than the existing AGV (Auto Guided Vehicle), which only traveled a fixed path along the track through various route settings.
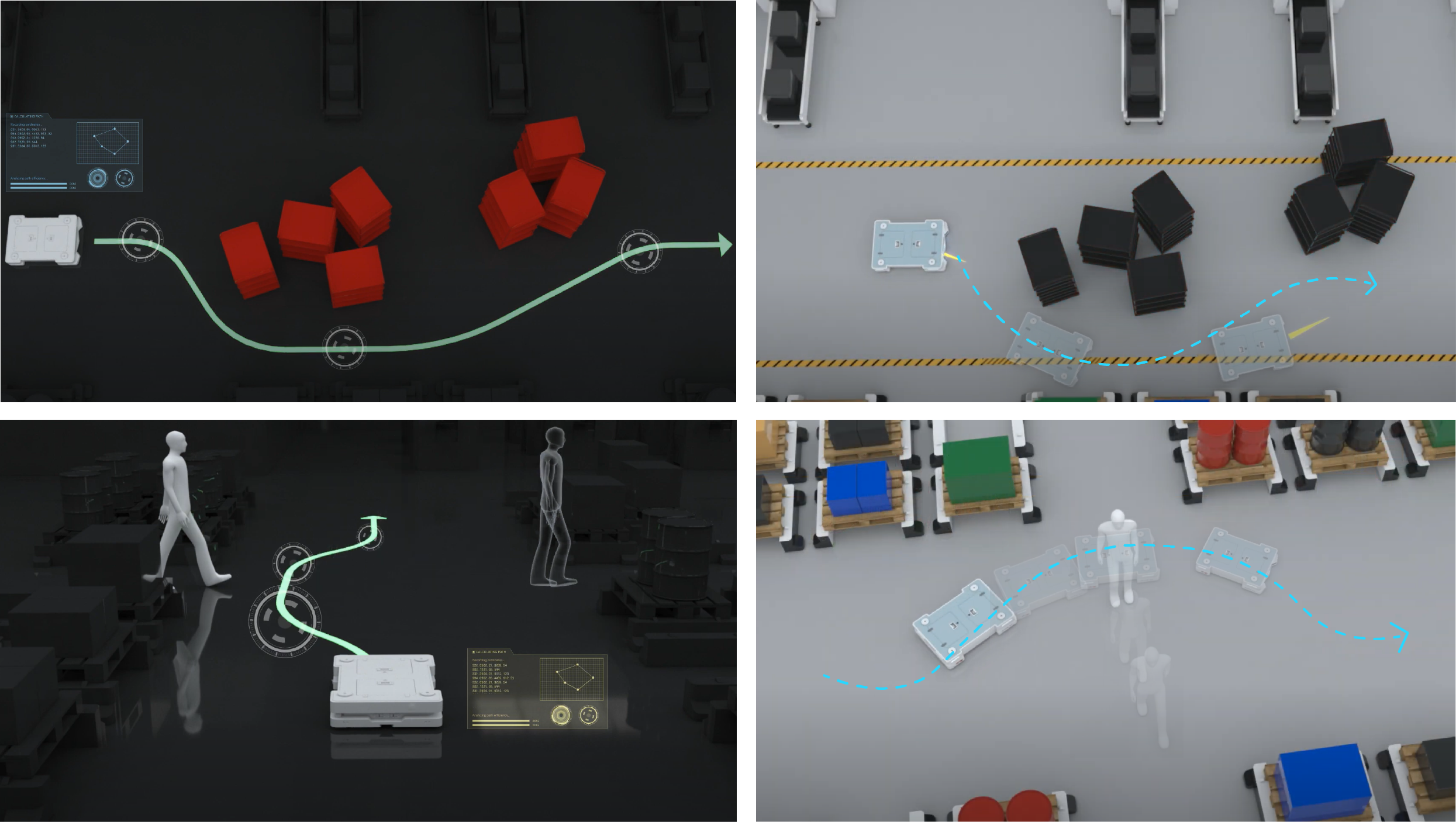
▸ Motion - planning : 경로 설정
▸ Motion - planning : 회피, 주행
미션을 수행하기 위해 목적지까지의 최적 경로를 계획합니다. 이후 생성된 경로를 추종하며, 맵 상에 존재하지 않는 동적, 정적 장애물에 대한 회피(가/감속, 정지)를 수행합니다. 원하는 도착위치와 각도를 입력해 현재 로봇의 위치에서 최적으로 주행할 수 있는 경로를 자율적으로 생성합니다. 주행 중 장애물이 감지될 경우 실시간으로 우회경로를 찾아 장애물을 회피합니다. 시스콘 AMR 시리즈의 경우 장애물 감지 시 회피할 것인지 정지할 것인지를 옵션으로 선택할 수 있으며, 최적경로가 아닌 지정경로주행 역시 가능합니다.
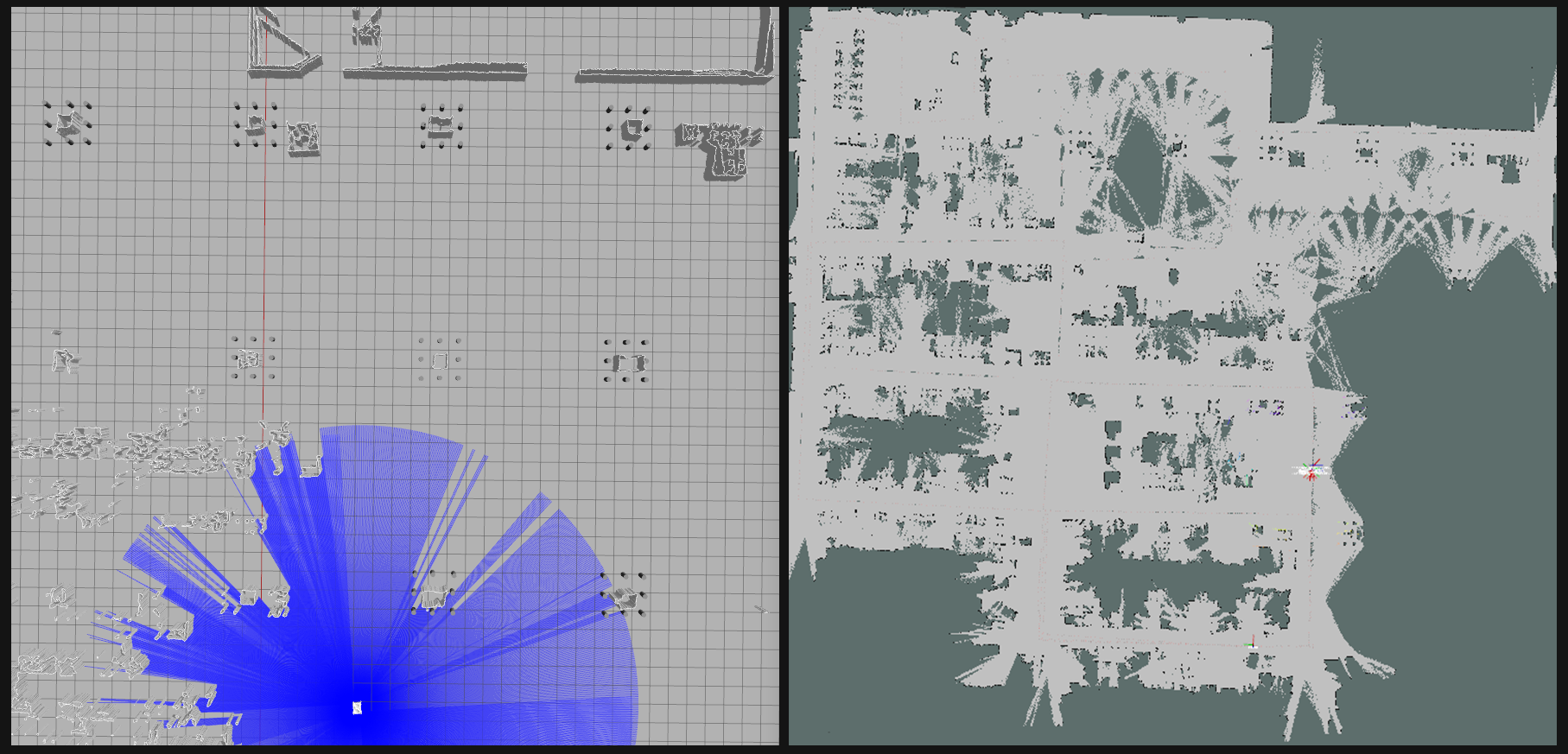
▸ Mapping
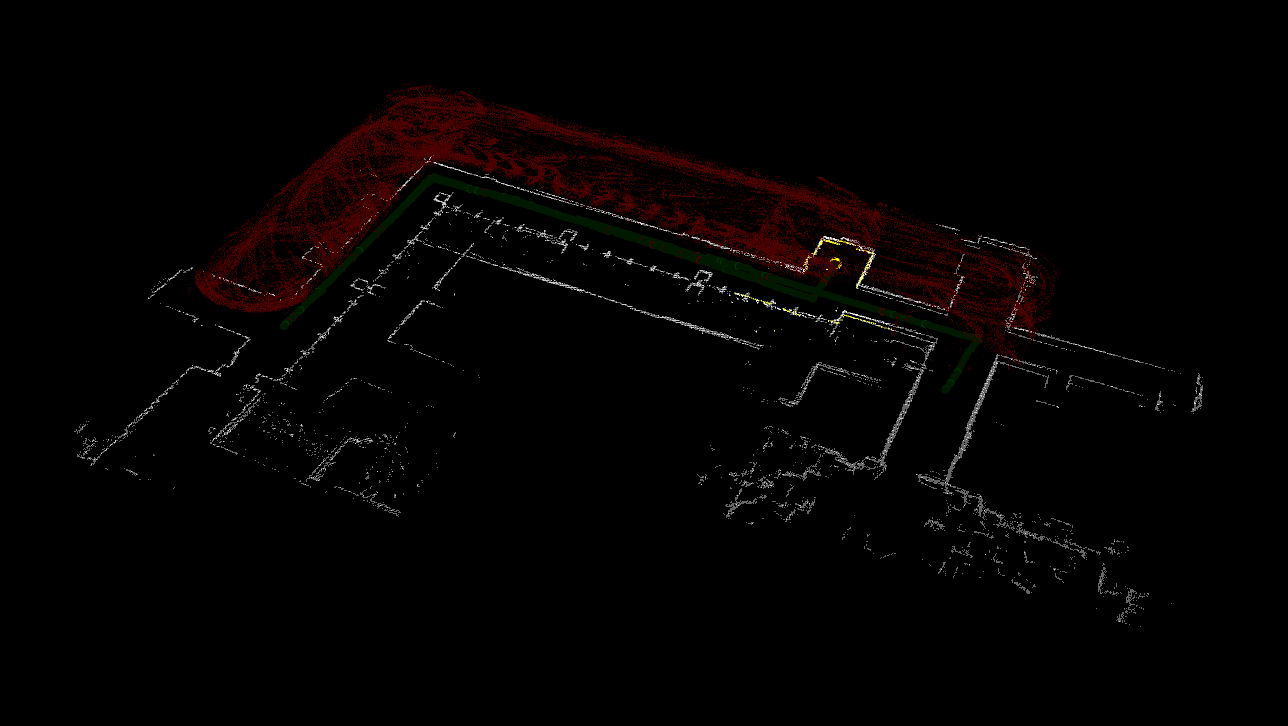
▸ Slam
시스콘의 AMR은 특정 Marker의 인식을 통해 상대물에 정밀하게 근접시키는 도킹 기술을 사용합니다.다양한 현장에서 쌓은 노하우를 통해 현장 맞춤 도킹 기술력을 보유하고 있습니다.
시스콘의 AMR은 일정 거리를 유지하며 특정 사람을 따라가는 기능을 수행합니다.

우리 시스콘은 산업 현장에서의 다양한 니즈 확보와 그를 기반으로 닦은 기술 스택을 통해 국낸 산업용 모바일 로봇 시장에서의 경쟁력을 갖추게 되었으며, 표준 플랫폼 밑 산업용 모바일용 최적 시스템 개발을 통해 차별화를 할 것입니다.
We have secured competitiveness in the domestic industrial mobile robot market by securing a technology stack based on the diverse needs of industrial sites. We will differentiate by developing a system optimized for industrial mobile under a standard platform.